
Скачать с Depositfiles

2.5 Вычисление дирекционных углов замкнутого теодолитного хода
Дирекционный угол начальной стороны выбирают из табл.2. Дирекционные углы последующих сторон полигона вычисляют по формуле
![]() (7)
(7)
В этой формуле исправленный угол ![]() тот, который заключен, между предыдущей и последующей сторонами полигона. Например, для второй стороны полигона, т.е. стороны (II-III) дирекционный угол вычисляется по формуле
тот, который заключен, между предыдущей и последующей сторонами полигона. Например, для второй стороны полигона, т.е. стороны (II-III) дирекционный угол вычисляется по формуле
![]()
Знак «минус» перед третьим членом в первой части формулы берут в том случае, когда сумма двух первых членов превышает 180°.
Если же сумма двух первых членов настолько велика, что после вычитания из нее 180° значение дирекционного угла какой-нибудь стороны полигона окажется больше чем 360°, то в этомслучае следует еще вычесть 360°. Это и будет искомое значение дирекционного угла.
Тан, пользуясь приведенной выше формулой, последовательно переходя от одной стороны к другой, т.е. от предыдущей к последующей, вычисляют дирекционные углы всех сторон полигона.
Вычислив дирекционные углы всех сторон полигона, производят контроль вычислений. Для этого необходимо продолжить вычисления, используя исправленное значение последнего измеренного угла полигона, чтобы получить вторично значение дирекционного угла начальной стороны.
Вычисления считаются безошибочными, если полученное путем вычислений значение дирекционного угла начальной стороны полигона будет в точности (до I») равно заданной величине.Эту величину следует записать в графу «Дирекционные углы» в конце всех вычислений.
2.6 Вычисления приращений координат точек замкнутого хода
Формулы, по которым определяются приращения координат, следующие:
![]()
![]() (8)
(8)
где ![]() и
и ![]() — приращения координат;
— приращения координат;
![]() — горизонтальное приложение длины линии;
— горизонтальное приложение длины линии;
![]() — дирекционный угол стороны полигона.
— дирекционный угол стороны полигона.
Пример
![]()
![]()
Значения приращений координат в теодолитном ходе вычисляет с округлением до сотых долей метра.
2.7. Вычисление невязок в приращениях координат и их распределение
В замкнутом теодолитной ходе невязки в приращениях координат определяют по формулам:
![]()
![]() (9)
(9)
где ![]() и
и ![]() — алгебраические суммы приращений координат по координатным осям, соответственно X и Y.
— алгебраические суммы приращений координат по координатным осям, соответственно X и Y.
Прежде чем распределить полученные невязки, необходимо убедиться в их допустимости, судя не по каждой отдельной невязке ![]() или
или ![]() , а по невязке в периметре полигона.
, а по невязке в периметре полигона.
Абсолютная линейная невязка в периметре полигона ![]() вычисляется по формуле:
вычисляется по формуле:
![]() (10)
(10)
Невязка в полигоне зависит главным образом от периметра полигона. Чем больше периметр, тем большую невязку следует в нем ожидать. Поэтому и допустимость невязки определяют в зависимости от периметра полигона. Невязка в периметре теодолитного полигона
при благоприятных условиях измерения линий считается допустимой,
если она не превышает 1/2000 периметра Р, т.е.
![]()
Отношение![]() к периметру хода Р, т.е.
к периметру хода Р, т.е.
![]()
называется относительной невязкой в периметре хода.
Если полученные невязки окажутся больше допустимых, то следует прежде всего проверить правильность вычисления. При отсутствия ошибок в вычислениях следует перемерить в первую очередь длины тех сторон дирекционные углы которых близки к дирекционному углу вычисленному по формуле
![]()
Если невязка в периметре![]() оказалась допустимой (табл.6), то невязки по осям координат
оказалась допустимой (табл.6), то невязки по осям координат ![]() и
и ![]() распределяют с обратным знаком на все приращения (по соответствующей оси) пропорционально длинам сторон полигона.
распределяют с обратным знаком на все приращения (по соответствующей оси) пропорционально длинам сторон полигона.
Поправки в приращения координат вычисляют по формулам:
![]()
![]()
![]()
![]() (11)
(11)
……………….……………….
![]()
![]()
Для упрощения вычислений поправок в приращения координат периметр и длины сторон полигона рекомендуется выражать в сотнях метров. Поправки в приращения вычисляются с точностью до сантиметра.
Пример:
![]() Р=789м=7,9 сотни метров (табл.6)
Р=789м=7,9 сотни метров (табл.6)
![]()
![]()
![]()
Сумма поправок должна быть равна невязке с обратным знаком. Если сумма поправок вследствие приближенных вычислений не равна невязке, то некоторые из поправок следует исправить так, чтобы эта сумма равнялась невязке с обратным знаком, т.е.
![]()
![]()
![]()
В том случае, когда невязка в приращениях по какой-либо оси мала» невязку распределяют по I см только на несколько приращений, подученных по наиболее длинным сторонам полигона.
Поправки в приращения координат с их знаком подписывают «над» или «под» вычисленными знаками приращений. Затем производят алгебраическое сложение значений приращений координат. Величины исправленных приращений заносят в графы 9 и 10 табл. 6
Контролем вычислений исправленных приращений служит точное совпадение алгебраической суммы их по каждой из осей в отдельности о теоретической величиной, т.е. эти суммы должны быть равны нулю.
![]()
![]()
2.8 Вычисление координат вершин полигона
Координаты начальной точки полигона приведены в табл. 1.Координата X иди У последующей вершины полигона равна координате предыдущей вершины плюс (алгебраически) соответствующее исправленное приращение со своим знаком.
![]()
![]()
![]()
![]()
………………………
![]()
![]()
Контролем вычислений координат вершин замкнутого полигона является получение координат первой вершины полигона, которые должны быть равны значениям заданных координат этой вершины. Вычисленные значения координат вершин полигона записывают на самой н… стороне в соответствующих графах ведомости.
Скачать с Depositfiles
Азимуты
Это направление, измеряемое в градусах по часовой стрелке от севера на азимутальной окружности. Азимутальный круг состоит из 360 градусов. Девяносто градусов соответствует востоку, 180 градусов — югу, 270 градусов — западу, а 360 градусов и 0 градусов — северу.

Слово «азимут» иногда используется как синоним азимута для обозначения направления (показания в градусах) от одного объекта к другому. Такое использование корректно только в первом (СВ) квадранте между 0° и 90°.
Азимуты также можно считывать с юга. Национальная геодезическая служба Национального управления океанических и атмосферных исследований (NOAA) (бывшая Береговая и геодезическая служба США) всегда использует юг в качестве нулевого направления. В пожарной службе дикой природы азимут всегда считывается с северной точки.
Направление ветра
Азимут часто используется для обозначения направления ветра. Традиционно направление ветра указывается как одна из восьми точек компаса (С, СВ, В, ЮВ, Ю, ЮЗ, З, СЗ). Однако графики направления ветра и скорости часто дают значение азимута, используя 0° и 360° для севера. Ветры называются по направлению, откуда они дуют. Например, западный ветер дует с запада (или 270°), а юго-восточный ветер дует с юго-востока (135°).
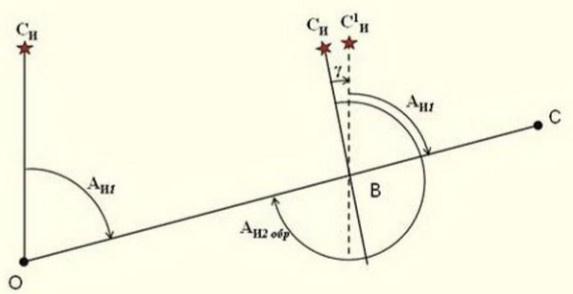
Обратный азимут и обратное визирование
Обратный азимут — это проекция азимута от начала координат до противоположной стороны азимутального круга. В азимутальном круге 360 градусов, поэтому противоположное направление будет 180 градусов (половина 360 градусов) от азимута.
Обратный азимут рассчитывается путем прибавления 180° к азимуту, если азимут меньше 180°, или вычитания 180° из азимута, если он больше 180°. Например, если азимут равен 320°, обратный азимут будет 320° — 180° = 140°. Если азимут равен 30°, обратный азимут будет равен 180° + 30° = 210°.
Обратное прицеливание — это метод прицеливания, в котором используется отсчет азимута, снятый в обратном направлении.
Компас – это инструмент, используемый для навигации и ориентации. Азимутальный компас градуирован/отмечен полным кругом в 360 градусов, который называется азимутальным кругом. Компоненты компаса включают магнитную стрелку, которая всегда указывает на магнитный север, градуированную окружность для откладывания углов от истинного севера и линию визирования для продолжения линии визирования при следовании курсу направления.
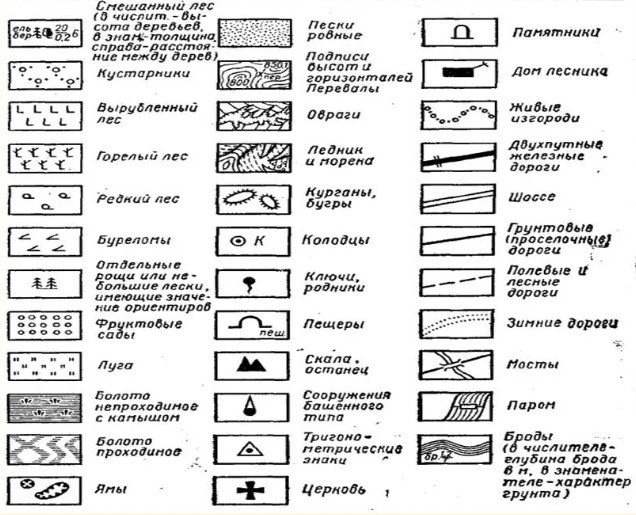
Условные знаки
Дирекционные углы и румбы
Дирекционные углы и румбы используются для ориентирования линий.
Дирекционным углом (α) линии называют угол, отсчитанный по ходу часовой стрелки от северного направления вертикальной линии километровой сетки (осевого меридиана зоны) до направления заданной линии. Пределы изменения дирекционного угла от 0º до 360º.
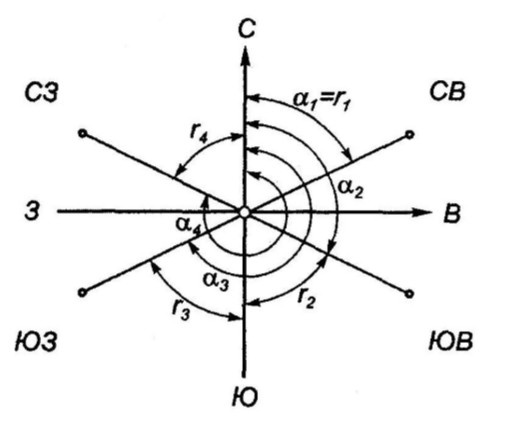
Это острый угол от ближайшего направления меридиана (северного или южного) до направления ориентирной линии. Пределы изменения румба от 0º до 90º.
Связь между дирекционными углами и румбами зависит от четверти, в которой находится заданное направление. Перевод дирекционных углов в румбы выполняется согласно таблице ниже.
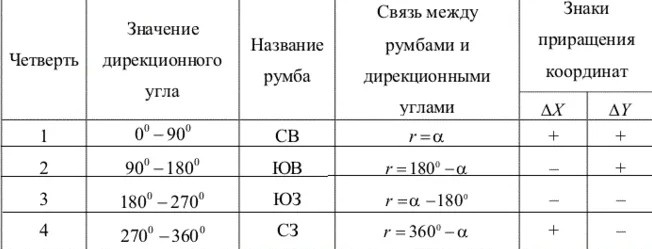
Пример перевода дирекционных углов в румбы
- если дирекционный угол α равен 42°15′55″, тогда согласно таблице румб вычисляется по формуле r=α=42°15′55″, а название румба будет СВ;
- если дирекционный угол α равен 100°45′11″, тогда согласно таблице румб вычисляется по формуле r=180°-α=180°-100°45′11″=79°14′49″, а название румба будет ЮВ;
- если дирекционный угол α равен 210°17′42″, тогда согласно таблице румб вычисляется по формуле r=α-180°=210°17′42″-180°=30°17′42″, а название румба будет ЮЗ;
- если дирекционный угол α равен 335°28′32″, тогда согласно таблице румб вычисляется по формуле r=360°-α=360°-335°28′32″=24°31′28″, а название румба будет СЗ.
2.3.1
Реальная ошибка ( С.К.О.) положения
контурной точки на карте принимается
равной 0.5 мм в масштабе карты :
![]()
мм,
предельная
![]()
мм
2.3.2
Ошибка в длине линии
![]()
,
измеренной по карте в![]()
раз
больше ошибки определения планового
положения точки.
![]()
мм,
2.3.3
Для ломаных линий :
![]()
,
где
![]()
—
число звеньев ломаной линии.
2. Точность определения расстояний и направлений между контурными точками плана
При
подготовке исходных данных для
перенесения проекта в натуру и решении
других задач приходится измерять
расстояния и направления между контурными
точками.
-
Точность
определения расстояний (горизонтальных,
проложений)
между близлежащими контурными точками.
Съемка их проведена
с одной точки съемочного обоснования.
Горизонтальное
проложение
между контурными точками:
![]()
,
где
![]()
— соответственно координаты концов
линий, определяемые
графически.
С.
к. п.![]()
линии
при условии, что с.к.
п. положения концов линий
![]()
.
![]()
где
![]()
—
коэффициент автокорреляции координат
контурной точки.
Коэффициент
автокорреляции координат для близлежащих
точек :
![]()
,
где
и
и
соответственно с.к.п. положения
исходного пункта и контурной точки.
Для
близлежащих контурных точек можно
принять
= 0,4 -0,6.
Погрешность
расстояния
![]()
равна
погрешности
положения
контурной
точки лишь при
=
0. Корреляцией
координат контурных точек можно
пренебречь, если
концы линии находятся на значительном
расстоянии
друг от друга или их съемка выполнена
с разных точек съемочной сети.
Таким
образом, при некоррелированных
координатах, (когда
=
0 ) :
![]()
Пример
1
При
съемке застроенных территорий с
капитальной застройкой
![]()
0,3 мм на плане . При
=
0,6, для близлежащих контурных точек
получим:
![]()
на
плане.
С
вероятностью, близкой к 1.0 предельная
погрешность
расстояния между близлежащими точками
капитальных зданий и сооружений
не превысит 0,4 мм на плане.
Пример 2
Для
плана
на незастроенной территории с четкими
очертаниями контуров, погрешность тг
= 0,5мм на
плане; положение точек независимо, так
как их съемка выполнена
с разных точек съемочного обоснования
![]()
тогда
![]()
мм
на плане.Следовательно,
предельная погрешность расстояния
![]()
мм
на
плане.
3.
Средняя квадратическая погрешность
определения направления (дирекционного
угла)
3.1
Дирекционный
угол линии между точками с координатами
![]()
,
![]()
определяется
по формуле :
![]()
.
СКП
определения величины дирекционного
угла
![]()
линии
длиной S
между контурными точками, положение
которых некоррелировано, определится
по формуле
![]()
Для
близлежащих контурных точек СКП
дирекционного угла:
![]()
Формулы
(1.1), (1.2) показывают, что СКП
дирекционного угла уменьшается с
увеличением
расстояния между точками. Поэтому при
привязке проекта
автомобильной дороги к пунктам
геодезического обоснования
за исходное направление принимают
имеющее
большую длину.
Например,
при
![]()
8 см
на плане и
![]()
мм
на плане,
найдем
![]()
![]()
Предельная
погрешность определения дирекционного
угла
![]()
3.2
СКП измерения дирекционного угла
линии
длиной S
между контурными точками, положение
которых некоррелировано,
определится по формуле
![]()
4.
Точность определения высотных параметров
НА плане.
Точность
топографических планов в высотном
отношении
характеризуется
средней квадратической
![]()
или
средней
![]()
погрешностью
определения по
горизонталям плана высот точек
относительно ближайших пунктов
съемочного
обоснования. Погрешности
и
связаны следующей зависимостью:
=
1,25
![]()
,
что следует
учитывать при расчетах точности
крупномасштабных топографических
съемок.
Основным
видом наземных топографических съемок
является тахеометрическая , обладающая
рядом несомненных преимуществ.
Тахеометрическая
съемка производятся
путем набора пикетов, интерполирования
и проведения горизонталей.
Полнота и детальность изображения
рельефа зависят от высоты сечения,
густоты
пикетов и пр. Но
до мельчайших подробностей рельеф
изобразить нельзя,
какой бы ни была высота сечения рельефа,.
Это не позволит
сделать масштаб плана. При съемках
приходится обобщать рельеф, выделяя
главное и отбрасывая второстепенное.
Погрешности,
влияющие на точность положения
горизонталей:.
Первая
группа — погрешности,
влияющие на точность положения
горизонтали по высоте и не
зависящие
от угла наклона топографической
поверхности:
1)
построения съемочного обоснования;
2)
«топографической шероховатости»
поверхности земли (мелкие неровности
земной поверхности); 3) определения
высот пикетов;
4)
обобщения рельефа,
возникающие из-за неоднородности ската
между пикетами;
5)
несовершенства
средств вычисления отметок точек.
Вторая
группа —
погрешности, вызывающие плановое
смещение горизонтали.
Точность высотного положения горизонтали
в этом случае зависит
от угла наклона топографической
поверхности:
1)
построения планового обоснования;
2)
нанесения пикетов на план;
3)
интерполирования и проведения
горизонталей;
4)
вычерчивания горизонталей;.
Точность
положения горизонтали по высоте
зависит
главным образом от погрешностей
обобщения рельефа при съемке. Горизонтали
получают на плане путем линейного
интерполирования
между высотами пикетов. Однако в
результате интерполирования мы
имеем точку
![]()
высотой
![]()
,
а не точку земной поверхности с высотой
![]()
(рис.1).
Разность
![]()
назовается
истинной
погрешностью обобщения рельефа
при производстве съемки.
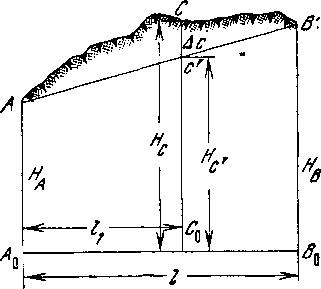
Рис.
1. Обобщение рельефа при съемке
Средняя
квадратическая погрешность![]()
при
съемке вследствие
обобщения рельефа, вычисляется по
формуле
![]()
,
где
![]()
— коэффициент случайного влияния
обобщения рельефа при съемке,
приведенный к длине в 1
м;
![]()
—
расстояние между пикетами,
выраженное в метрах.Величина
коэффициента
зависит
от характера рельефа и колеблется
в пределах 0,01—0,02. Для
промышленно-гражанского
строительства принято
= 0,012.
Из
расчета численных значении
погрешностей, влияющих на точность
положения горизонталей получены
многочисленные
формулы для оценки точности положения
горизонталей по высоте
и определения отметок точек
по плану.
1.
Формула
проф. Н. Г. Видуева
для вычисления средней
квадратической
погрешности ( С.К.П.) положения
горизонтали по высоте:
![]()
где
![]()
— высота сечения рельефа,
![]()
— знаменатель масштаба плана,
![]()
— средний уклон
местности.
2.
Формула проф.
В. Д. Большакова
для вычисления (
С.К.П.)
![]()
определения
высоты точки по горизонталям плана:
![]()
где
—
высота
сечения рельефа,
—
коэффициент случайного влияния обобщения
рельефа при съемке,
![]()
—
расстояние между пикетами при съемке
рельефа,
![]()
=0,03м;
= 0,7 мм на плане,
—
знаменатель численного
масштаба плана;
— коэффициент, колеблющийся
в пределах 0,010—0,015 для местности с углом
наклона